날짜
25.8.29 ~ 25.8.31
장소
세종공동캠퍼스 실내 체육관
주최
과학기술 통신부, 정보통신산업진흥부
지정과제 2
스마트 시티 조성에 필요한 SW융합 제품 또는 서비스 개발(자율주행 관련 데이터)
프로젝트 개요
개발 배경
기존의 자율 주행은 차량용의 센서 기반으로 동작하며, 주정차 차량으로 인한 사각지대가 존재 하였음, 이를 해결하고자 기존 인프라인 CCTV를 사용하여 사각지대 문제를 해결하고자 하였음
개발 목표
- CCTV(기존 인프라)를 사용한 저비용, 고효율 모델 제작
- AI기반 사람 감지 시스템 개발로 보행자 사고 예방
- 보행자 감지 시 신호 생성
제품의 설명
시스템 설명
사용된 장비
카메라
- (카메라) intel REALSENSE
- (스피커) 부저
- (싱글 보드) Jetson Nano
AI Server
- 3080ti 그래픽 카드
자동차
- Jetson TX2
시스템 구성도
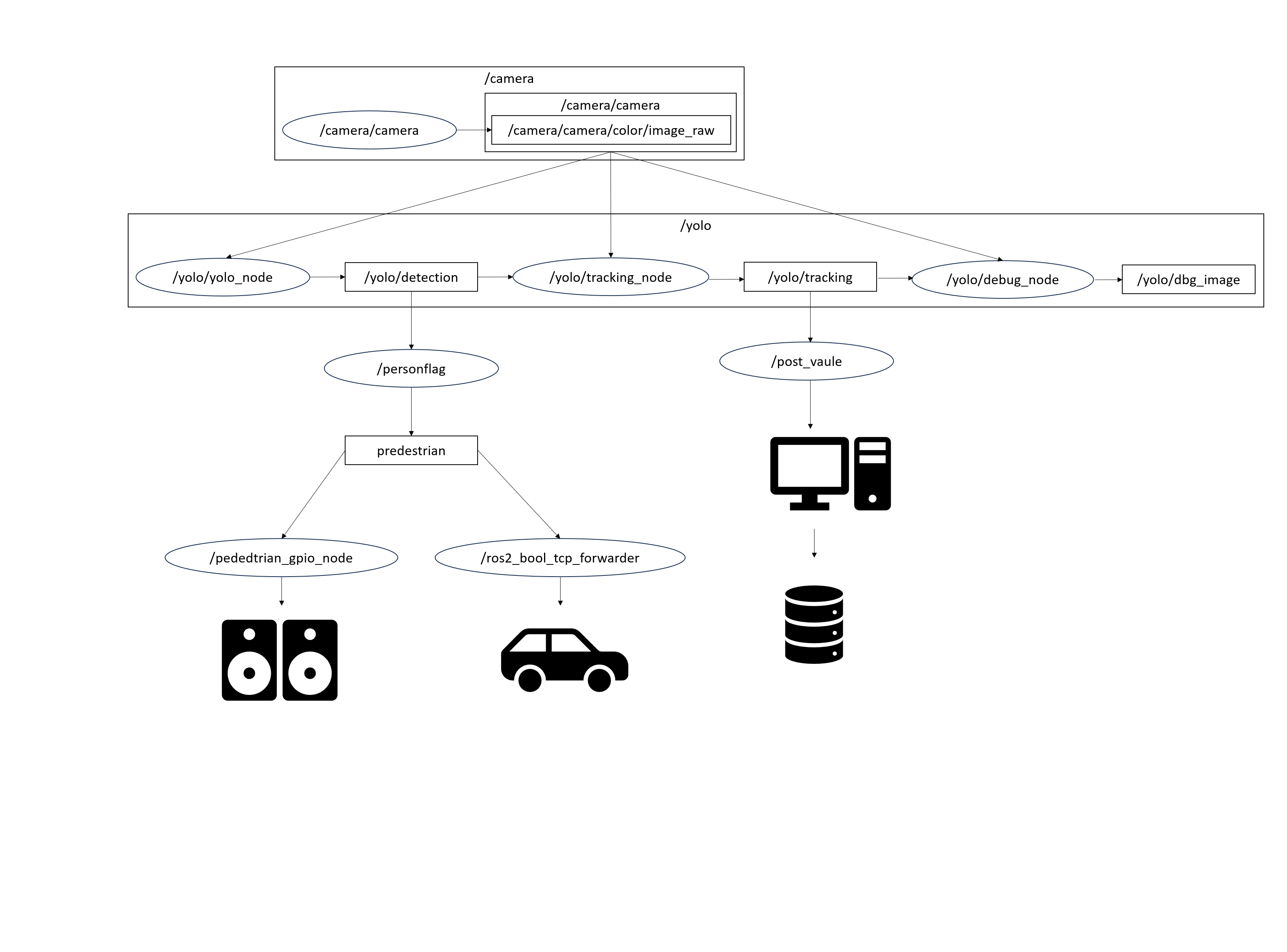 - 기설된 CCTV의 역할을 수행할 intel사의 영상이 Camera 노드를 통해 /camera/camera/color/image_raw 신호로 발행됨
- Yolo ros의 yolo_node, tracking_node, debug_node는 이를 구독하여 기존의 Yolo 모델의 단점인 사람이 감지되지 않음에도 트래픽을 잡아먹는다는 문제를 해결하고자 LifeCycle 도입
- Yolo/detection 노드를 통해 person이나 human이라는 라벨 이름이 감지되게 되면 /personflag에서 true 값이 반환하게 됨
- 이 후 ros2와 ros1의 연동을 위한 bridge 역할을 하는 pedestrian 노드를 통해 서로 통신을 진행하게 됨
- pedestrian_gpio_node를 통해 CCTV 역할을 하는 Jetson Nano나 차량인 Jetson TX2의 GPIO에 신호를 전달하게 됨
- ros2_bool_tcp_forward 역시 신호를 구독하여 차량의 속도를 늦추는 역할을 수행함
- yolo/tracking노드를 통해 객체가 감지 될 때, post_value노드가 class_id, score, tracking id를 구독함
- 구독한 class_id, score, tracking id는 시간 값과 같이 DB에 저장되어 추후 데이터 셋으로 활용 가능함
- 기설된 CCTV의 역할을 수행할 intel사의 영상이 Camera 노드를 통해 /camera/camera/color/image_raw 신호로 발행됨
- Yolo ros의 yolo_node, tracking_node, debug_node는 이를 구독하여 기존의 Yolo 모델의 단점인 사람이 감지되지 않음에도 트래픽을 잡아먹는다는 문제를 해결하고자 LifeCycle 도입
- Yolo/detection 노드를 통해 person이나 human이라는 라벨 이름이 감지되게 되면 /personflag에서 true 값이 반환하게 됨
- 이 후 ros2와 ros1의 연동을 위한 bridge 역할을 하는 pedestrian 노드를 통해 서로 통신을 진행하게 됨
- pedestrian_gpio_node를 통해 CCTV 역할을 하는 Jetson Nano나 차량인 Jetson TX2의 GPIO에 신호를 전달하게 됨
- ros2_bool_tcp_forward 역시 신호를 구독하여 차량의 속도를 늦추는 역할을 수행함
- yolo/tracking노드를 통해 객체가 감지 될 때, post_value노드가 class_id, score, tracking id를 구독함
- 구독한 class_id, score, tracking id는 시간 값과 같이 DB에 저장되어 추후 데이터 셋으로 활용 가능함
시스템 구축 과정
- Airnet
- Yolo ros
- Yolov8-seg + CityScapes
- mysql
- flask
주요 기능
기능 소개
- CCTV 영상 처리
- 실시간 영상 입력 : 교차로 / 도로의 CCTV 영상 실시간 수집
- 보행자 인식 : CityScapes 데이터 셋을 학습 시킨 Yolov8-seg를 사용하였음, Airnet을 사용하여 전천후 영상처리로 센서와 시야의 한계를 극복함
- 차량 제어
- 제어신호 생성
- 자동 감속 / 정지
- 데이터 저장 및 통계 활용
- 유동 통계분석
- 데이터베이스 연계
- 앱을 통한 보행자 경고 시스템
- 앞으로의 계획 : 미래 자동차 제어 프로토콜 표준화를 목표, 단계적으로 확산할 것이라 예상하기에 경고 시스템, 감속, 정지 시스템 구축
기대 효과
안정성
- 보행자 : 사각지대 사고 예방, 교통약자 보호
- 운전자 : 선제적 경계/반응으로 사고 예방 효과
사고 예방 데이터 제공
- 사고 가능성이 높은 지역 데이터를 지자체에 제공 --> 교통 정책, 스마트 시티, 시민 안전 인프라 구축 지원
사회적 비용 절감
- 교통사고 감소 : 의료비, 보험, 구급 비용 격감(약 3600억)
- 사회적 인력 낭비 감소 : 사고 감소로 인해 인적자원 부담 완화
- 스마트시티 실종 가능 : 별도 탐지 인프라 구축 불필요, 유지/운영비 최소화
사업성
주요 파트너
지자체/공공 기관 : 지자체와 한국도로공사 같은 공공기관 차량용 SW 회사 : 현대 오토 에버 등 네비게이션/어플리케이션 회사 : 네이버 맵, 카카오 지도, 티 맵 등
교통사고 다발 구역 데이터 분석으로, 기존 인프라 사용으로 인한 저비용과 높은 수익성을 확보하며, 동시에 공공적 가치를 창출할 수 있는 가능성을 지님
추후 확장 가능성
- DataSet 활용 : 보행자의 세부적인 위치를 저장하여 지자체에서 사용할 수 있는 데이터 셋으로 사용
- 센서간 상호 보완 : CCTV인프라만이 아닌 V2X 통신을 통한 주변 차량 데이터와 보행자의 앱을 통한 데이터를 통한 상호보완시스템 구축
- V2X/6G 연계 : 차량, 인프라 통신 기반 전국 단위 확장