1일차
| 시간 | 내용 |
|---|---|
| 10:00~13:00 | 자율 주행 자동차의 정의 |
| 14:00~18:00 | 차량 조립 및 소프트웨어 |
| ## 자율 주행 자동차의 정의 | |
| ### 내연기관 vs 전기차 | |
| 내연기관의 경우 | |
| 많은 부품이 필요한데 반에 |
전기차의 경우
만으로 구성할 수 있다충전 시스템
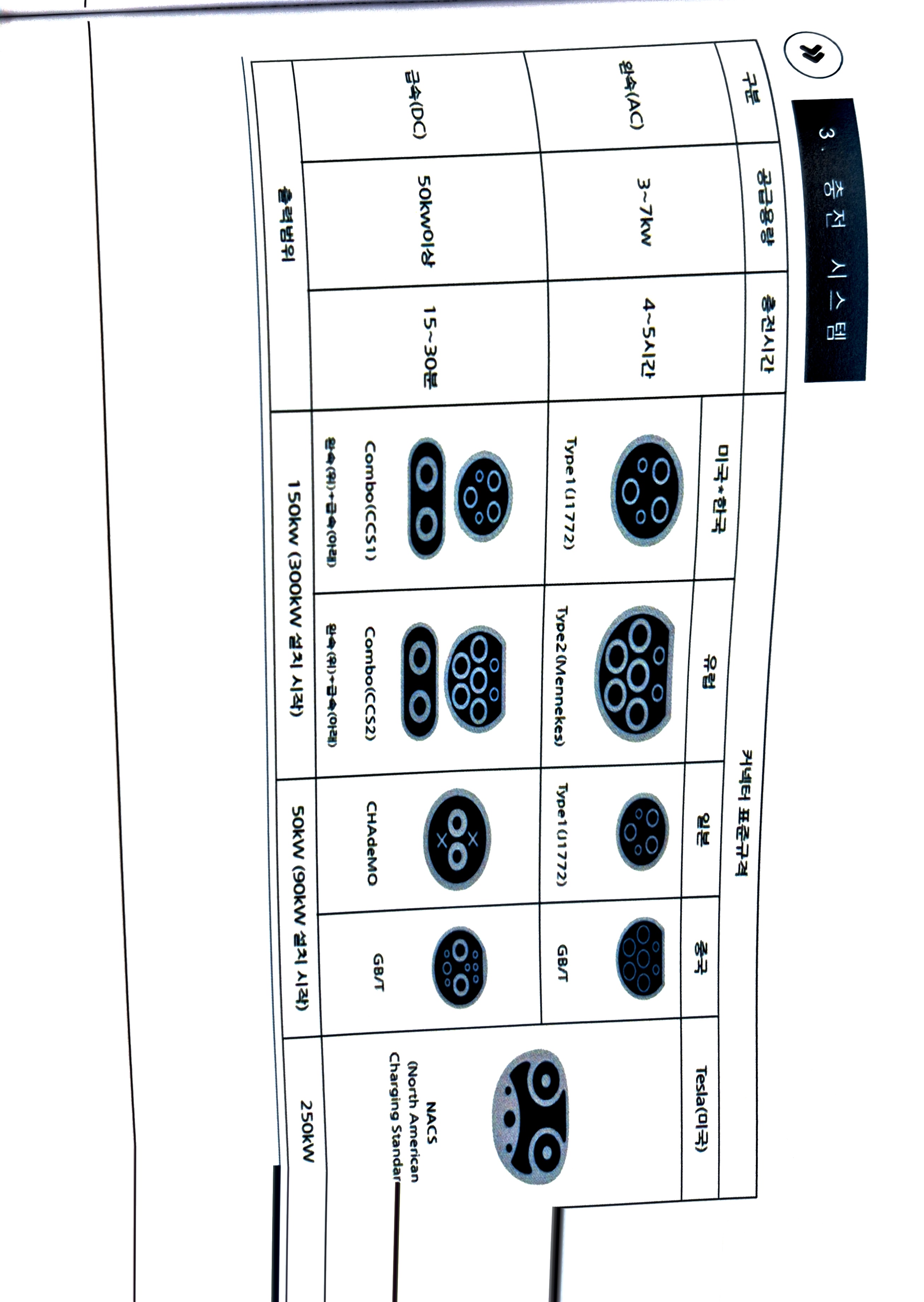 이처럼 나라마다 다른 규격의 충전 시스템이 존재하고,
커넥터, 인렛, 어댑터로 다른 규격의 충전 시스템을 사용하기도 한다
이처럼 나라마다 다른 규격의 충전 시스템이 존재하고,
커넥터, 인렛, 어댑터로 다른 규격의 충전 시스템을 사용하기도 한다
특히 중국이 이 분야에 선두주자인데 중국은 값 비싼 배터리를 팔지 않고, 공유 자원으로 둠으로써 비용을 낮추고 충전시간을 크게 단축 시켰다.
레이더와 라이더
레이더는 주변물체와 거리를 측정할수 있지만 뭉그려서 측정 가능하기에 정확한 모양은 알수 없다. 라이더는 펄스 레이저를 이용하여 비교적 정확한 형태의 측정이 가능하다
자율주행
카메라
테슬라의 경우 8대의 카메라와 강력한 비전 처리를 통해 최대 250m 범위까지 360도 시야를 제공함 이 과정에서 가장 중요한 기술은 압축 기술임
자율주행은 총 5단계로 나눌수 있습니다
| 단계 | 내용 |
|---|---|
| 0단계 | 비자동화 |
| 1단계 | 운전 보조(가/감속 조절, 차로 유지) |
| 2단계 | 부분 자동화(고속도로 주행보조,원격 주차) |
| 3단계 | 조건부 자동화(교통 혼잡시 저속주행, 고속도로 주행, 차선변경) |
| 4단계 | 고도 자동화(시스템이 정해진 도로와 조건하에 운전) |
| 5단계 | 완전 자동화(시스템이 모든 도로와 조건에서 운전함) |
| 현재는 2.5에 가까움 |
구조
Separate Steering and Throttle Skid Steering Omni Vehicles - Omni3 - OmniX - OmniPlus - 매카넘 휠 Crab Driving Tank Turn
부품
Brushed motor Servo motor Battery - 단위인 S는 serial
| 정격 | 완충 | 방전 | 경고 | |
|---|---|---|---|---|
| 1S | 3.7v | 4.2v | 2.7v | 3.5v |
| 3S | 11.1v | 12.6v | 8.1v | 10.5v |
방전시 일반적인 방법으로 충전이 안됨
픽스호크 TF-luna lidar 텔레메트리 라디오 모터 드라이브 Pwm 확장포트 수신기 Gps
pixhawk
프로그램 종류
미션 플래너
모든 기능을 갖춘 gcs Windows, Mac os
Q그라운드 컨트롤
ArduPliot을 포함한 MAVLink 지원 자동 조종장치와 함께 작동 Windows, Mac os, Linux, android 및 ios
APM 플래너
미션플래너보다 적은 컨텐츠를 보유하나 리눅스와 맥에 최적화 Windows, Mac os , Linux
사용법
설정에서 본인이 만들고자하는 펌웨어 설치
텔레메트리는 통신속도 57600으로 기기의 텔레메트리와 노트북의 텔레메트리의 Net ID를 동일하게 부여
필수 하드웨어의 가속계 보정을 통해 차량의 균형을 잡아줌
아래의 나침반도 동일하게 설정
R8리시버의 바인드 버튼을 누른채 전원을 인가하여 바인드
무선 조정 보정을 통해 버튼 및 레버의 범위를 설정
Servo output을 통해 수신기에 연결된 모터를 어떻게 제어할지 설정
비행모드 설정을 통해 모드 설정
Fail saft를 통해 배터리가 완전히 방전되지 않게 안전장치설정
배터리 감시자를 통해 실시간 실 전압 계측(최초에 정확한 전압 기입 해줘야함)